
Configuring VRSG for UAS / RPA Simulation



MVRsimulation VRSG can be configured to simulate an unmanned aerial system (UAS) -- a remotely piloted vehicle (RPA) in a variety of ways, ranging from using VRSG’s internal camera payload model in which the telemetry of the simulated UAS / RPA is provided by a DIS entity, to fully integrated applications such as the MUSE UAS tactical trainer.
Features
VRSG features to support UAS simulation include:
- Built-in UAS sensor payload model, which allows any DIS airborne platform to be used as a UAS, when a notional UAS meets your training needs.
- Support for the MUSE VIDD V2.4 for high-fidelity UAS training.
- Built-in 2D overlay displays for several UAS platforms.
- Real-time generation of full-motion video (FMV) in HD H.264 / .265 or MPEG2 formats for either network streaming or file-based recorded output. The H.264 / .265 video can optionally stream/record with embedded UAS KLV metadata using STANAG 4609 and MISB ST 0601.1 and 0601.9 standards.
- Electro-Optic (EO) and Night Vision Goggle (NVG) simulation modes.
- MVRsimulation's own Video Player, which is optimized for streaming VRSG H.264/H.265 FMV and can decode and display KLV metadata.
- Stimulate remotely operated video receivers such as an Android Team Awareness Kit (ATAK) or a ROVER device with streaming HD digital video of UAS or targeting pods.
In the real world, sensor operators use a gamepad or joystick-type device to manipulate the camera view to view and identify objects on the ground. In VRSG you can simulate manipulating the camera view with a gamepad or joystick. Controlling a simulated UAS camera enables you to attach to a DIS entity that supplies the UAV airframe telemetry. In this mode, VRSG uses its internal sensor payload model, with which you use an attached gamepad to pan and zoom the camera view. In VRSG's UAV configuration file, you can set parameters for laser designation and view magnification maximum and minimum values.
VRSG's generated H.264/.265 full-motion video with embedded KLV metadata is fully compliant with the latest standards recommended by MISB. The video output's compliance was tested with the NGA's Community Motion Imagery Test Tool (CMITT) tool, which validates video and metadata conformance: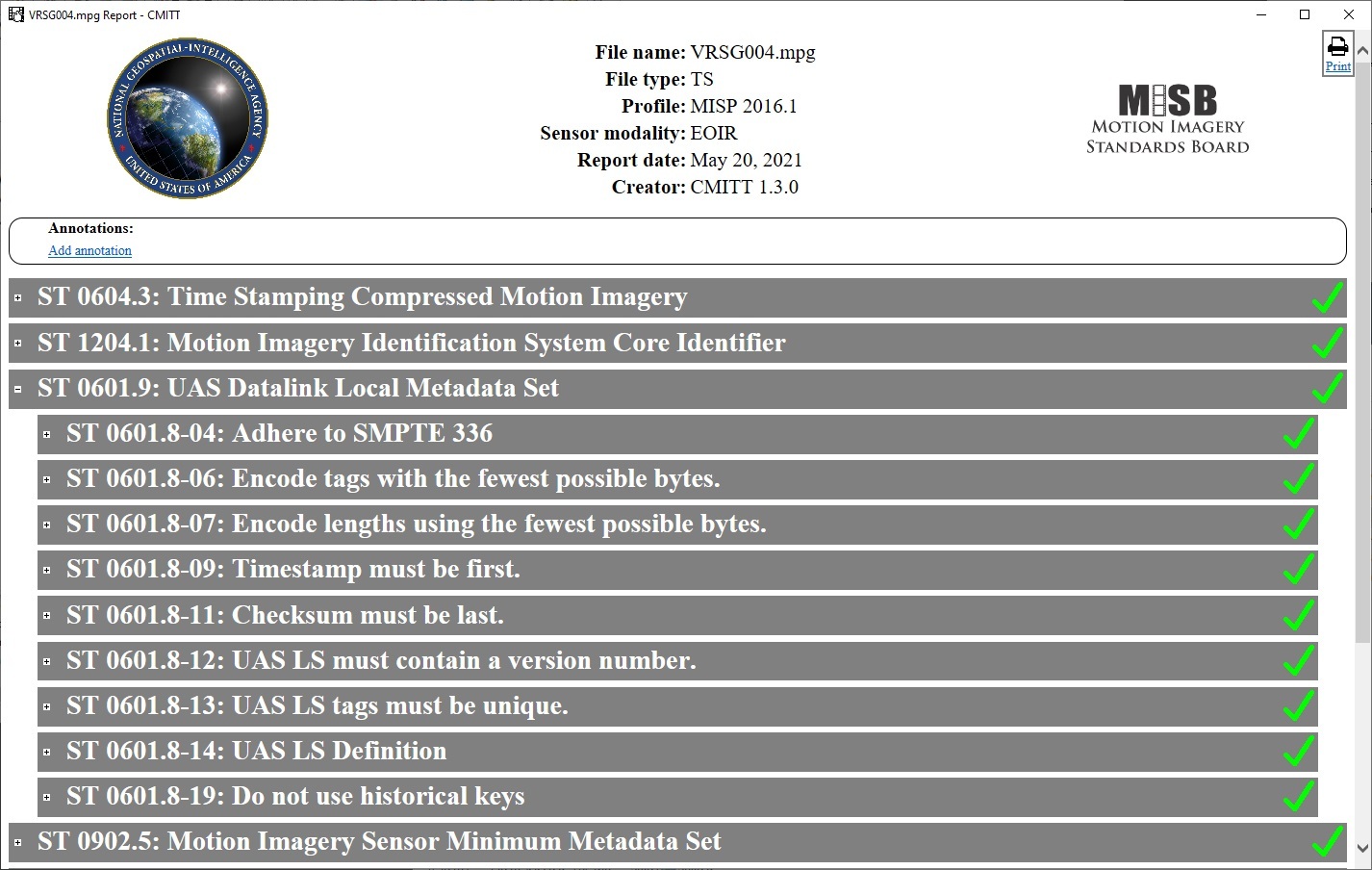
Simulation training
Use of VRSG's UAS simulation in training environments include:
- Capturing high-resolution virtual world screen images remotely. VRSG can instruct the UAV camera to capture the current image in its field of view from remote operators in the simulation environment, save the image as a large-format NITF file, and deliver the file for display on another computer. This feature simulates the Global Hawk large image sensor capability.
- Using VRSG as a simulated, live, virtual video feed from a UAS that is used to classify ground information from a Geographical Situational Display. Airborne or space-borne collection systems that use Ground Moving Target Indication (GMTI) and target identification devices create symbolic representations of moving entities over large geographic areas. VRSG enables the operator to refine target identification and classification.
- Streaming real-time UAS KLV metadata multiplexed into an HD H.264 (MPEG-4) transport stream. Tactical exploitation systems can use VRSG's streaming video feed to visualize sensor payload imagery in real time and extract the UAV metadata. VRSG supports the KLV encoding of UAS telemetry in a compliant subset of NATO standard.
- Coupling VRSG with a video receiver such as an ATAK or ROVER, used by JTACs / FACs in close air support (CAS) missions. VRSG generates the simulated 3D scene and the range and coordinates of a designated target on the ATAK or ROVER.
- Connecting Cloud Cap Piccolo AutoPilot to VRSG via a third-party plugin.
Joint mission training
One aspect of training UAS operators entails interacting with JTACs in joint mission training. Training together in a networked synthetic environment, the UAS operator and the JTAC on the ground work together to identify the same target in a scene.
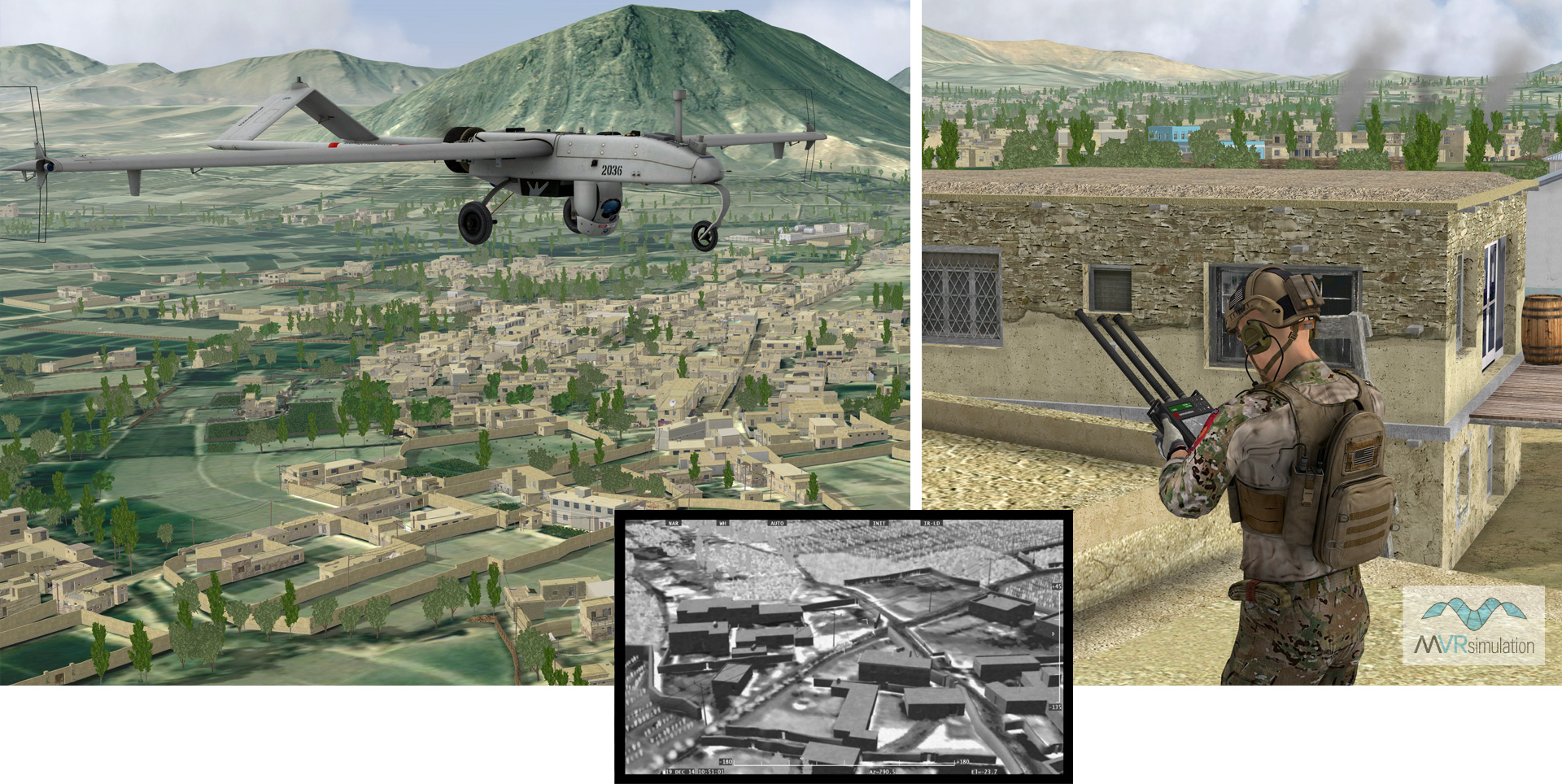
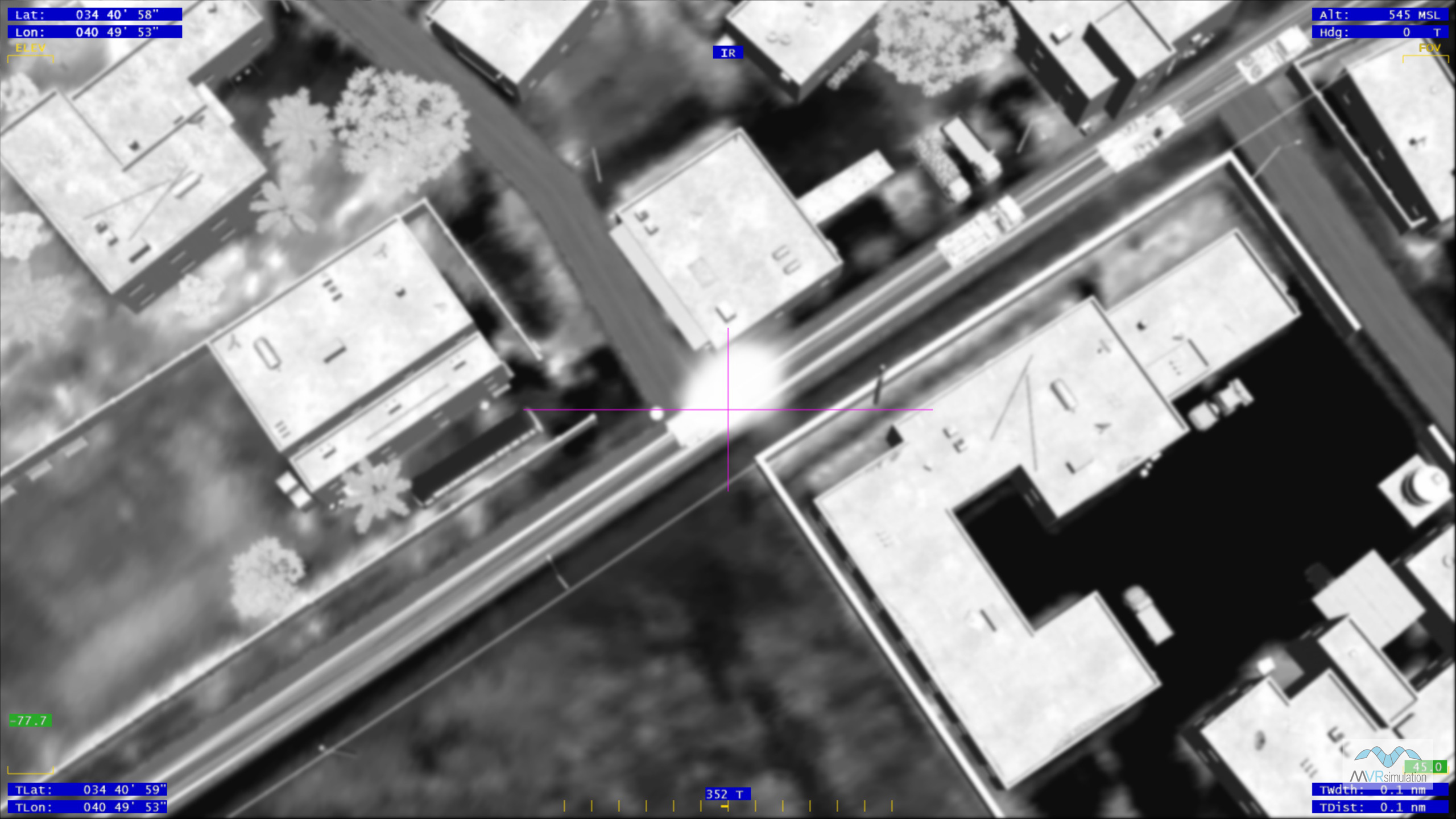
Left: MVRsimulation VRSG real-time scenes featuring a Shadow IE UAS entity flying over geospecific terrain of Afghanistan. Center: The Shadow’s simulated sensor view of activity below. Right: JTAC character examining UAS feed on a simulated MVR III Mini-ROVER.

Inside the ground control station, showing VRSG simulating the Shadow camera payload.
VRSG running inside the Shadow UAV's GCS
On the left: The ground control station shell, mounted on a humvee, which tows the Shadow UAS behind it on a launcher trailer as shown above. On the right: A view inside the control station, showing VRSG simulating the Shadow camera payload.

The ground control station (GCS) shell.

Inside the GCS, with VRSG simulating the Shadow camera payload.

MVRsimulation VRSG ruggedized rackmount system.
MVRsimulation's ruggedized rackmount system with VRSG
VRSG provides realistic simulation capability for UAS training packaged in a ruggedized deployable container for the MUSE and AFSERS programs. The image to the left shows a ruggedized container-based system that is designed such that it can be palletized and airlifted to training exercises in the field on short notice and can survive the journey and the training scenario under harsh environmental conditions. MUSE unmanned training systems are deployed for overseas training exercises.